| Archiv:
Fahrtregler/Speedcontroller/ESC/Schalter/Powerswitches: |
Fahrtregler4_4
Nachfolger des Fahrtregler4_1 |
Fahrtregler4_4


|
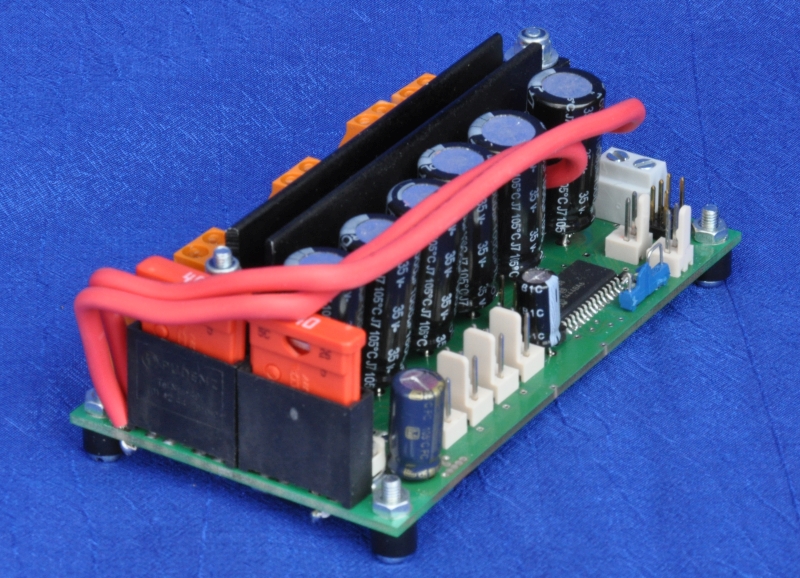
3-Kanal Fahrtregler:
Fahrtregler für 8 - 26V Motoren (Bürstenmotoren).
4 Eingänge eines Fernsteuerungsempfängers werden auf 3 Motor-Endstufen
(für Fahrantrieb und Waffenmotor) umgesetzt.- 8 - 26V Betriebsspannung (bis zu LiPo 6S)
- max. 40A abgesichert
- 3 Endstufen (H-Brücke) für brushed Fahrmotoren bzw. Waffenmotor
- 4 Empfängereingänge
- Parametrierbare Funktionen (Panzersteuerung, Kreuzmischer,...)
- Einsatz von zwei Gyroskope (vorwärts/rückwärts) möglich
- Messen und Anzeige von Akku-Unterspannung
- Integrierter Failsafe; Separate LED-Anzeige ; Abschaltung Motoren
- Frei parametierbare Kreuzmischerfunktion für Fahrantrieb
- Anschluss für Waffenmotor unterschiedlich parametrierbar:
- H-Brücke für Schlagwaffe vorwärts/rückwärts
- 2 Anschlüsse für Endlagenschalter zum Abschalten der Bewegung
- Ansteuerung von 2 Relais oder zwei Ventilen
- Zeitgesteuerte Ansteuerung der H-Brücke oder Ventile
- Sequenzer-Ansteuerung von zwei Relais oder Ventilen (z.B. für
Pneumatik-Zylinder mit
automatischer Rückstellung)
Realisiert mit: Infineon-Leistungshalbbrücken: BTN8982B
|
| Fahrtregler4_3 |
Fahrtregler4_3
|
4-Kanal Fahrtregler:
Fahrtregler für 10 - 26V Motoren (Bürstenmotoren).
5 Eingänge eines Fernsteuerungsempfängers werden umgesetzt für 2 Fahrmotoren,
einen Waffenausgang und zwei Schaltausgänge.
- 10 - 26V Betriebsspannung (bis zu LiPo 6S)
- max. 40A => abgesichert
- 2 Endstufen (H-Brücke) für brushed Fahrmotoren
- 1 Endstufe (H-Brücke) für Waffenmotor (z.B.. Spinner, Hammer,...)
- 2 Endstufen für Schaltaktionen (Elektr.Kompressor, Pneumatikventile,...)
- 5 Empfängereingänge
- Parametrierbare Funktionen (Panzersteuerung, Kreuzmischer,...)
- Integrierter Failsafe
- Kreuzmischerfunktion
Realisiert mit: Infineon-Leistungshalbbrücken. BTN7960B
|
| Fahrtregler4_2
(nicht mehr erhältlich !)
Nachfolger ist Fahrtregler4_5
|
Fahrtregler4_2
|
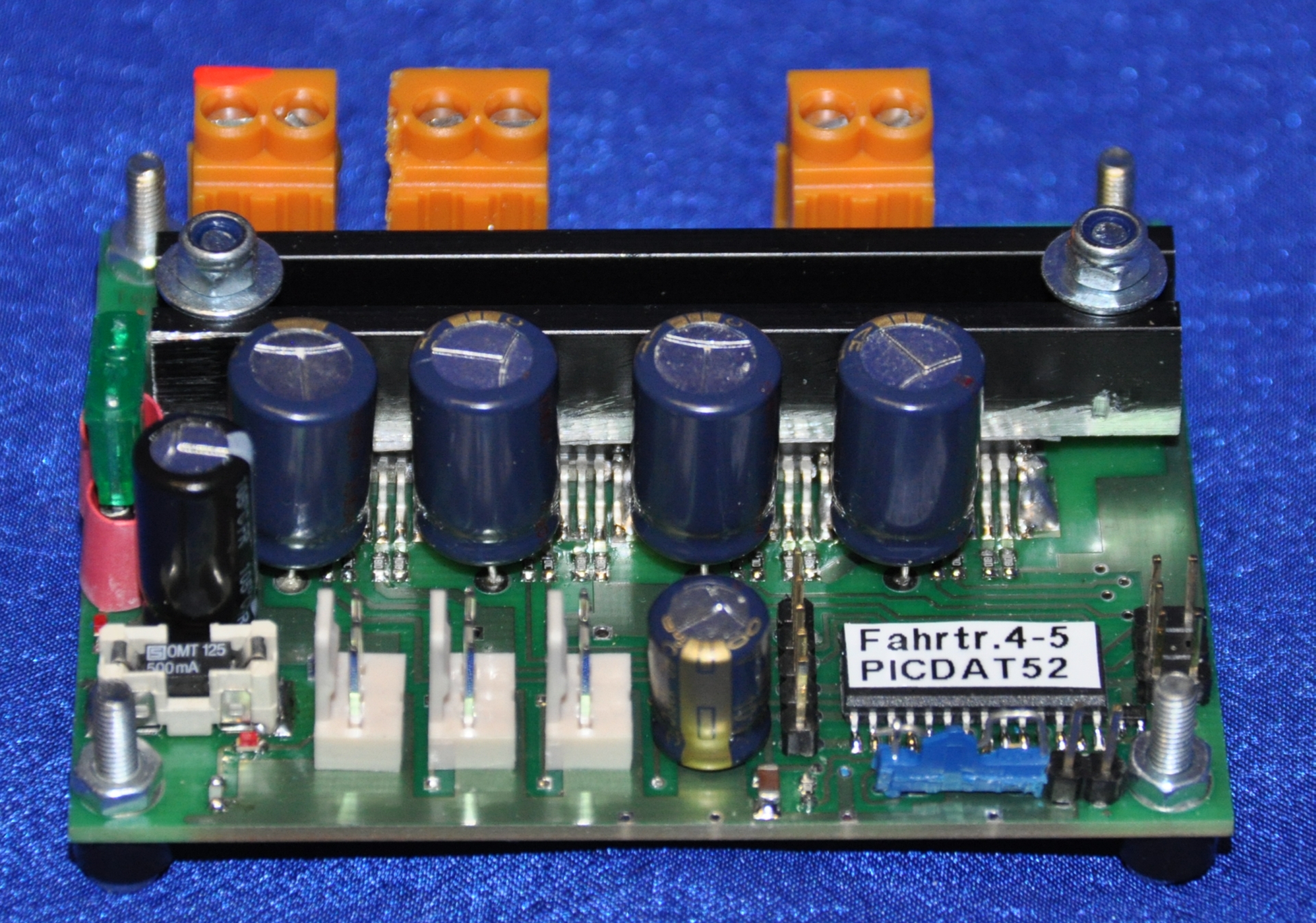
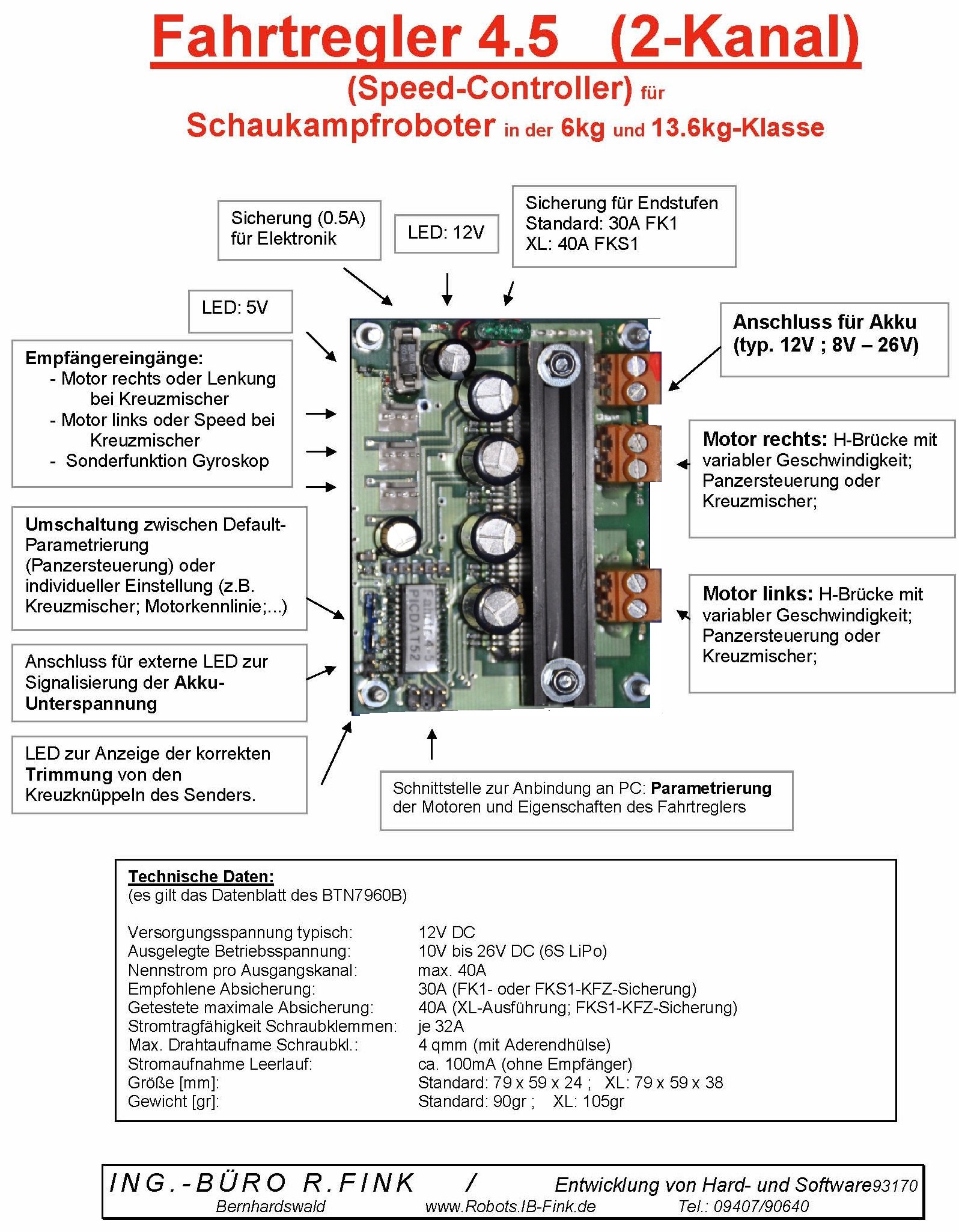
2-Kanal Fahrtregler:
Fahrtregler für 12V Motoren.
2 Eingänge eines Fernsteuerungsempfängers werden auf zwei Motor-Endstufen
(für den Fahrantrieb) umgesetzt.
- 12V Betriebsspannung
- max. 40A => abgesichert
- 2 Endstufen (H-Brücke) für brushed Fahrmotoren
- 2 Empfängereingänge
- Parametrierbare Funktionen (Panzersteuerung, Kreuzmischer,...)
- Integrierter Failsafe
- Kreuzmischerfunktion
Realisiert mit: Infineon-Leistungshalbbrücken. BTN7960B |
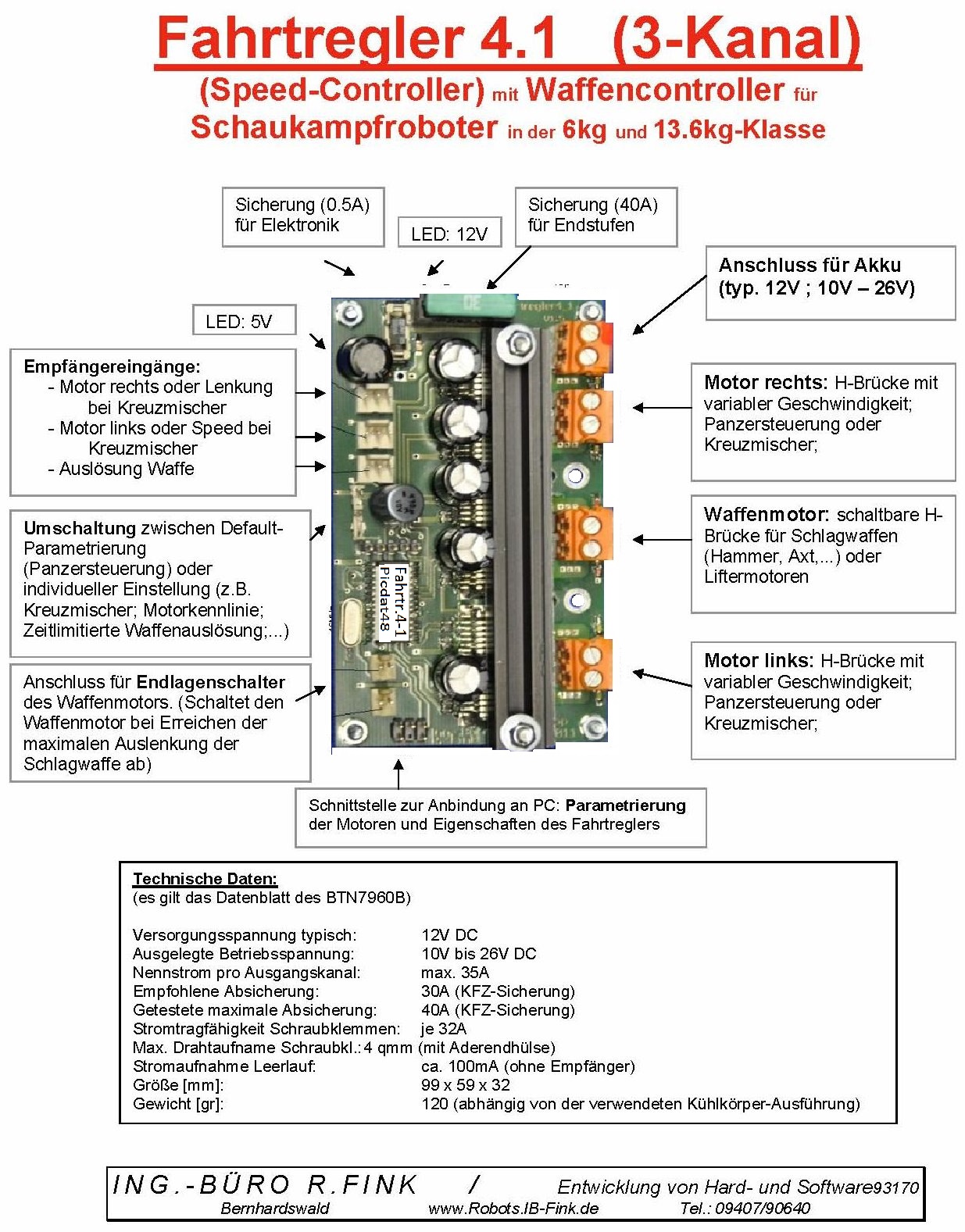
| Fahrtregler4_1
(nicht mehr erhältlich !)
|
Fahrtregler4_1


|
3-Kanal Fahrtregler:
Fahrtregler für 10 - 24V Motoren (Bürstenmotoren).
3 Eingänge eines Fernsteuerungsempfängers werden umgesetzt für 2 Fahrmotoren
und 1 Waffenausgang.
- 10 - 26V Betriebsspannung
- max. 40A => abgesichert
- 2 Endstufen (H-Brücke) für brushed Fahrmotoren
- 1 Endstufe (H-Brücke) für Waffenmotor (z.B.. Spinner, Hammer,...)
- 3 Empfängereingänge
- 2 Anschlüsse für Endlagenschalter zum Waffenmotor
- Parametrierbare Funktionen (Panzersteuerung, Kreuzmischer,...)
- Einsatz von zwei Gyroskope (vorwärts/rückwärts) möglich
- Integrierter Failsafe
- Kreuzmischerfunktion
Realisiert mit: Infineon-Leistungshalbbrücken. BTN7960B
|
Fahrtregler3_1
Fahrtregler3_2
(nicht mehr erhältlich !)
|
Fahrtregler3
|
4-Kanal Fahrtregler:
Fahrtregler für 12V Motoren.
4 Eingänge eines Fernsteuerungsempfängers werden auf zwei Motor-Endstufen
(für den Fahrantrieb) und vier Schaltausgänge (für Spezialeffekte oder
Waffenansteuerung) umgesetzt.
Für Sonderanwendungen stehen noch vier Digitaleingänge zur Verfügung, um z.B.
Endschalter abzufragen.
Die Funktion des Fail-Safe ist in die Software integriert.
Im Vergleich zu "Fahrtregler2" ist die Platine geteilt worden und wird
in Sandwich-Bauweise montiert. |
| Fahrtregler2
(nicht mehr erhältlich !)
|
Fahrtregler2
|
4-Kanal Fahrtregler:
Fahrtregler für 12V Motoren.
4 Eingänge eines Fernsteuerungsempfängers werden auf zwei Motor-Endstufen
(für den Fahrantrieb) und vier Schaltausgänge (für Spezialeffekte oder
Waffenansteuerung) umgesetzt.
Für Sonderanwendungen stehen noch vier Digitaleingänge zur Verfügung, um z.B.
Endschalter abzufragen.
Die Funktion des Fail-Safe ist in die Software integriert. |
| Fahrtregler_Ant2
(nicht mehr erhältlich !)
|
Fahrtregler_Ant2
|
3-Kanal Fahrtregler:
Fahrtregler für 7.2V LiPo-Zellen und kleinen Servomotoren (ohne Servoelektronik)
zum Einbau in Robotern der Ant-Klasse (150gr). Nachfolgeversion von
Fahrtregler_Ant1. Enthält zwei Endstufen für die Fahrmotoren und eine Endstufe für die
Waffe. |
| Fahrtregler_Ant1
(nicht mehr erhältlich !)
|
Fahrtregler_Ant1
|
3-Kanal Fahrtregler:
Fahrtregler für 7.2V LiPo-Zellen und kleinen Servomotoren (ohne Servoelektronik)
zum Einbau in Robotern der Ant-Klasse (150gr). Enthält zwei Endstufen für die
Fahrmotoren und eine Endstufe für die Waffe.
Diese Version wird nicht mehr aufgebaut und geliefert. |
| Motorschalter |
Powerswitch1_1
|
1-Kanal Leistungsschalter:
MOSFET-Schalter für ca. 50Ampere. Unterscheidung der Empfängersignale für
zwei Kanäle. Jeder Kanal einzeln mit spezieller PC-Software parametrierbar.
|
|
|
|
|
|
|
|
|
|